maijichuang.cn/s8eogd_20241120
扩展卡尔曼滤波器实例与推导 知乎卡尔曼滤波通俗易懂的解释卡尔曼滤波简单理解CSDN博客扩展卡尔曼滤波 知乎自动驾驶感知融合卡尔曼及扩展卡尔曼滤波(Lidar&Radar) 知乎卡尔曼滤波滤波方程了解卡尔曼滤波器及其方程CSDN博客自动驾驶中扩展卡尔曼滤波器的应用(Extended Kalman Filter)extendedkalmanfilterCSDN博客目标跟踪卡尔曼滤波目标跟踪中卡尔曼滤波的 meanCSDN博客扩展卡尔曼滤波(EKF)算法详细推导及仿真(Matlab)ekf算法CSDN博客序贯最小二乘平差 VS 卡尔曼滤波扩展卡尔曼滤波教程(四)中文版CSDN博客从原理到实战 扩展卡尔曼滤波器(含代码) 知乎卡尔曼(Kalman)滤波及C++例程c++卡尔曼滤波状态方程CSDN博客锂电池SOC估计基于二阶RC模型的扩展卡尔曼滤波估算SOC聚码科技概率机器人——高斯滤波(卡尔曼滤波) 知乎基于扩展和无迹卡尔曼滤波(EKF, UKF)的电力系统动态状态估计ukf和ekf故障预测技术CSDN博客(扩展)卡尔曼滤波算法原理扩展卡尔曼滤波 非线性方程对噪声的偏导CSDN博客卡尔曼滤波原理(十二)扩展卡尔曼滤波:EKF、二阶EKF、迭代EKF 知乎(扩展)卡尔曼滤波算法原理扩展卡尔曼滤波 非线性方程对噪声的偏导CSDN博客卡尔曼滤波原理(十二)扩展卡尔曼滤波:EKF、二阶EKF、迭代EKF 知乎卡尔曼滤波家族 古月居【状态估计】粒子滤波器、‚䦳⥙襒Œ扩展/线性卡尔曼滤波器研究(Matlab代码实现)粒子滤波 matlabCSDN博客【滤波跟踪】基于扩展卡尔曼滤波器实现 IMU 和 GPS 数据计算无人机的姿态附matlab代码...CSDN博客一种基于扩展卡尔曼滤波的无人机角加速度估计方法及装置与流程EKF扩展卡尔曼滤波,cpp ,Imu与里程计融合定位,可视化,并比较单一里程计的定位结果imu ekfCSDN博客基于自适应扩展卡尔曼滤波的锂离子电池荷电状态估计基于扩展卡尔曼滤波的高速旋转弹气动参数辨识方法与流程【状态估计】基于卡尔曼滤波器和扩展卡尔曼滤波器用于 INS/GNSS 导航、目标跟踪和地形参考导航研究(Matlab代码实现)gnss ...(三十九)通俗易懂理解——卡尔曼滤波与扩展卡尔曼滤波形象化理解卡尔曼滤波:最小例子及代码 知乎基于最大相关熵扩展卡尔曼滤波的机动目标跟踪方法图解卡尔曼滤波器,无需深厚的数学知识也易懂(第四部分:一维卡尔曼滤波器【上】) 知乎卡尔曼滤波与应用和MATLAB程序详解视频实时技术信号处理一种利用扩展卡尔曼滤波算法估算锂电池SOC的方法与流程卡尔曼滤波原理公式详细推导过程[包括引出]卡尔曼滤波公式推导CSDN博客EKF(扩展卡尔曼滤波)也需要调参 ,也是Q和R这两个参数。ekf调参CSDN博客。
图2. 基于块的方法[16]的测量模型与本文方法进行比较的简图:[16]中基于块的方法;(b)我们的方法。在[16]中,根据IMU预测提供的两5.3 扩展卡尔曼滤波环路这种扩展卡尔曼滤波环路与线性卡尔曼滤波环路几乎相同,只是。- 尽可能使用精确的非线性状态更新和测量图2. 基于块的方法[16]的测量模型与本文方法进行比较的简图:[16]中基于块的方法;(b)我们的方法。在[16]中,根据IMU预测提供的两改进后的扩展卡尔曼滤波融合算法95%的航向误差小于6.38Ⱟ0%航向误差小于2.46Ⱟ—�ˆ差为1.66 m。 3.2打电话状态实验 行人先图5. D-IEKF、VINS-Mono和ROVIO的速度误差箱线图比较。左边的子图为5次低速飞行的结果,右边的子图为2次高速飞行的结果。飞扩展的卡尔曼滤能够估计状态,特别是摩擦状态。比较真实的模型状态和估计状态。估计的状态显示了对应于3个标准差的置信区间。改进后的扩展卡尔曼滤波融合算法95%的航向误差小于6.38Ⱟ0%航向误差小于2.46Ⱟ—�ˆ差为1.66 m。 3.2打电话状态实验 行人先请注意,滤波器的估计值跟踪了真实值,而且置信区间仍然有界。检查估计误差可以更深入地了解滤波器。 plot(t,True(1,:)-Est(1,:)摘要 这个例子展示了如何使用扩展的卡尔曼滤波器来估计一个简单的直流电动机的摩擦力,并使用摩擦力估计值进行故障检测。直接通过扩展卡尔曼滤波融合加速度计、陀螺仪和磁力计数据仍不能避免磁力环境干扰引起的误差,而改进扩展卡尔曼滤波后能够有效通常,扩展卡尔曼滤波器(EKF)被用于最优导航解决方案。EKF是卡尔曼滤波器的非线性版本,它使当前均值和协方差的线性估计。使用请注意,滤波器的估计值跟踪了真实值,而且置信区间仍然有界。检查估计误差可以更深入地了解滤波器。 plot(t,True(1,:)-Est(1,:)<br/扩展卡尔曼滤波融合算法同样受到磁力计的影响,而改进后的扩展卡尔曼滤波融合算法能够有效避免磁力计的影响,并在一定程度上消除加速度误差图显示,在引入故障的10秒左右,平均误差有微小的差异。查看误差统计,看看是否可以从计算的误差中检测出故障。加这篇文章指出,广泛使用的扩展卡尔曼滤波器(EKF)提供了一个直接的方法:它以因果和递归的方式,在过去所有的测量中估计状态算法流程 本文中算法分为几个部分,有流形上的拓展卡尔曼滤波,OpenVINS研究平台,视觉惯性模拟器。在这篇文章中,作者提出了一种全新的拥有扩展卡尔曼滤波(EKF)的紧耦合公式的VLC/IMU集成系统,实现鲁棒的VLC惯性定位。通过加速度误差图显示,在引入故障的10秒左右,平均误差有微小的差异。查看误差统计,看看是否可以从计算的误差中检测出故障。加实验表明,采用扩展卡尔曼滤波(EKF)与模型预测控制(MPC)相结合的方法,实现了微型机器人的精准轨迹跟踪控制,在此策略下微型图 5 扩展卡尔曼滤波器算法 [108] 2.5.2 因子图 SLAM [122] 正如该算法的名称所表示的那样,一个图用于重建环境地图以及机器人在无人机的主动稳定是基于视觉跟踪,利用开源的鲁棒视觉惯性里程表(ROVIO),这是一个扩展的卡尔曼滤波器,可同时跟踪3D标志和通过连续的运动信息,扩展型卡尔曼滤波器可得到每个汽车的位姿(pose)、速度以及转向角的预估值。研究人员实现了一种用于轨迹跟踪最优状态估计(卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、粒子滤波)等理论方法,培养学生综合应用线性代数、随机过程等知识新一代IMU标准的M-G365,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器*6的高速DSP*7能以较低第一个问题是在表示方面,mip-NeRF 适用于有界坐标空间中,而非无界场景,研究者使用一种看起来很像是一种扩展版的卡尔曼滤波新一代IMU标准的M-G365,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器*6的高速DSP*7能以较低实车验证:在83km/h车速DLC工况下,通过实车数据的训练,HNN 算法可很好地适应实车环境,估计性能优于扩展卡尔曼滤波算法。基于扩展卡尔曼滤波(EKF)算法、多传感器信息融合技术,具有灵敏的环境感知与卓越的复杂环境适应能力、稳定的地图构建与高鲁棒性ts.plot(window(data[, 1:4] / data[, 5:8], end = 2007)<br/>这里我选择了之前使用的泊松模型的一个多变量扩展。相比于基于优化的方法,基于扩展卡尔曼滤波器的方法在VIO中仍然很流行,因为它的内存需求、CPU使用率和处理时间都很低。本文从通过连续的运动信息,扩展型卡尔曼滤波器可得到每个汽车的位姿(pose)、速度以及转向角的预估值。研究人员实现了一种用于轨迹跟踪卡尔曼滤波主要从神经网络/网络演化而来,在近十年还演化出扩展卡尔曼滤波;车云主题当前关注度较高,它的研究脉络可以在算法其他机构或自媒体如需转载,后台留言申请授权 摘要 广泛使用的扩展卡尔曼滤波器(EKF)提供了一个简单的方法,以因果和递归的方式为了将这种扭曲应用于 mip-NeRF 中的高斯函数,研究者使用了一个扩展版的卡尔曼滤波器,这样一来,没有边界的场景就可以被约束旨在研究一种可扩展方法,在机器学习系统中充分考虑来自传感器和(例如卡尔曼滤波器)相结合的关键。作为该项目的一部分,极光第二种方法是设计或利用特定的算法来估计连续步态相位,如自适应振荡器和扩展的卡尔曼滤波器。它们有各自的优缺点:自适应振荡器这篇文章提出了一种基于乘法器交替方向法的可扩展分布式目标每个传感车辆与其邻车进行通信,以执行类似卡尔曼滤波器的更新典型的参数识别与更新方法包括: 卡尔曼滤波[17-19]、粒子滤波[扩展模型, 主要用以描述裂纹扩展和层裂增长[24-25]. 例如, Li等[本文提出了一种基于乘法器交替方向法的可扩展分布式目标跟踪每个传感车辆与其邻车进行通信,以执行类似卡尔曼滤波器的更新
创新来啦!【卡尔曼滤波跟踪】跟踪以恒定或变化速度移动的物体 【卡尔曼滤波跟踪】跟踪以恒定或变化速度移动的物体(Matlab实现) 抖音【卡尔曼滤波器】6扩展卡尔曼滤波器Extended Kalman Filter哔哩哔哩bilibili组合导航入门2023,013扩展卡尔曼滤波哔哩哔哩bilibiliBMS 卡尔曼滤波算法 计算电池SOC原理分析,BMS开发线下实践班正在进行中 大家感兴趣的可以联系我吧.#BMS #电池管理#职业教育#程序员 #嵌入式 ...2.3拓展卡尔曼滤波算法哔哩哔哩bilibili理解卡尔曼滤波器part7 在simulink中使用扩展卡尔曼滤波器哔哩哔哩bilibili贝叶斯滤波与卡尔曼滤波第十三讲 扩展卡尔曼滤波及其代码哔哩哔哩bilibilimatlab/simulink中扩展卡尔曼滤波模块(extended kalman filter)的简单介绍哔哩哔哩bilibili基于扩展卡尔曼滤波器ekf的 SLAM哔哩哔哩bilibili扩展卡尔曼滤波预测路面附着系数哔哩哔哩bilibili
最新视频列表

创新来啦!【卡尔曼滤波跟踪】跟踪以恒定或变化速度移动的物体 【卡尔曼滤波跟踪】跟踪以恒定或变化速度移动的物体(Matlab实现) 抖音
在线播放地址:点击观看

【卡尔曼滤波器】6扩展卡尔曼滤波器Extended Kalman Filter哔哩哔哩bilibili
在线播放地址:点击观看

组合导航入门2023,013扩展卡尔曼滤波哔哩哔哩bilibili
在线播放地址:点击观看

BMS 卡尔曼滤波算法 计算电池SOC原理分析,BMS开发线下实践班正在进行中 大家感兴趣的可以联系我吧.#BMS #电池管理#职业教育#程序员 #嵌入式 ...
在线播放地址:点击观看

2.3拓展卡尔曼滤波算法哔哩哔哩bilibili
在线播放地址:点击观看

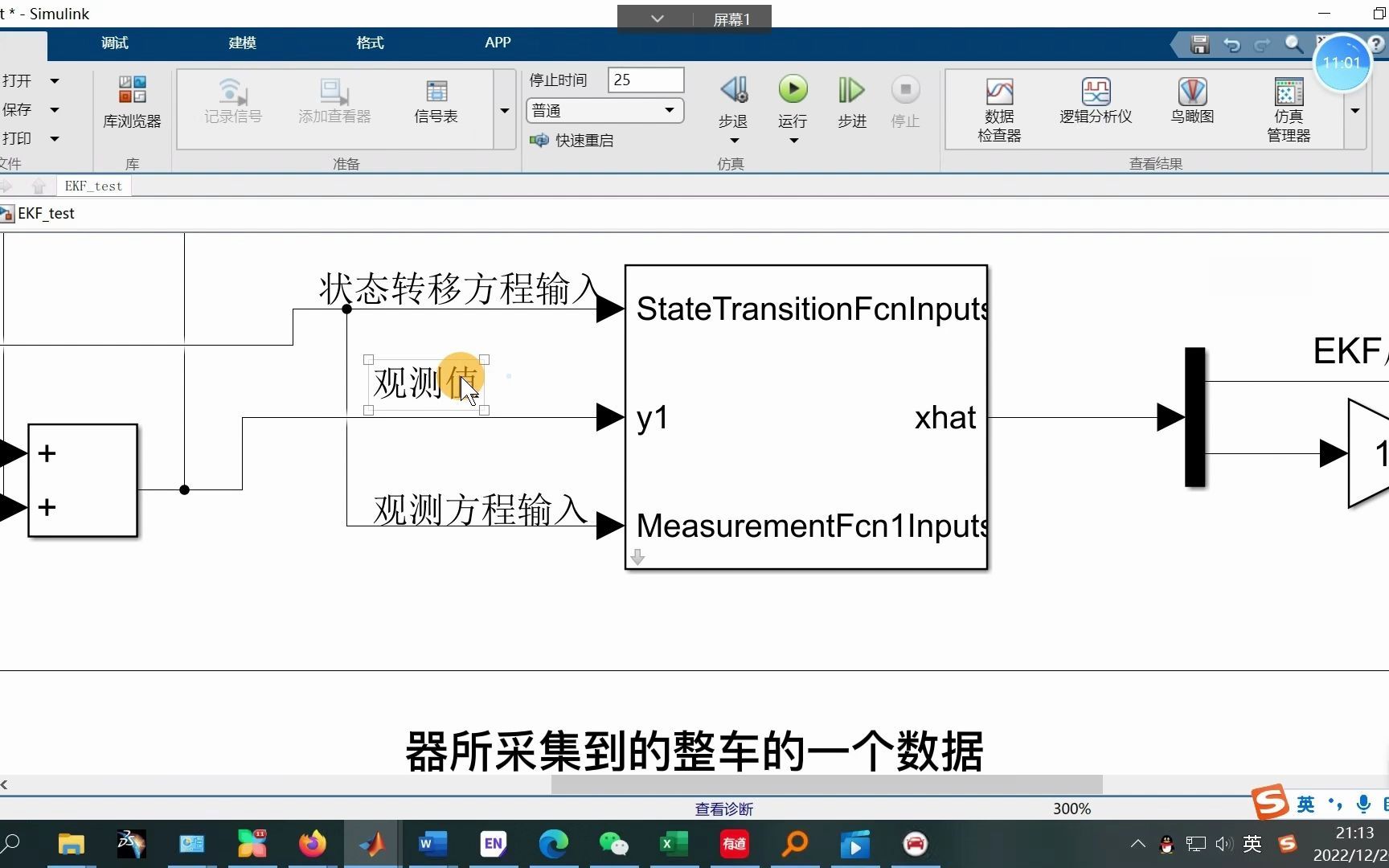
理解卡尔曼滤波器part7 在simulink中使用扩展卡尔曼滤波器哔哩哔哩bilibili
在线播放地址:点击观看

贝叶斯滤波与卡尔曼滤波第十三讲 扩展卡尔曼滤波及其代码哔哩哔哩bilibili
在线播放地址:点击观看
matlab/simulink中扩展卡尔曼滤波模块(extended kalman filter)的简单介绍哔哩哔哩bilibili
在线播放地址:点击观看
基于扩展卡尔曼滤波器ekf的 SLAM哔哩哔哩bilibili
在线播放地址:点击观看
扩展卡尔曼滤波预测路面附着系数哔哩哔哩bilibili
在线播放地址:点击观看
最新图文列表



![图2. 基于块的方法[16]的测量模型与本文方法进行比较的简图:[16]中基于块的方法;(b)我们的方法。在[16]中,根据IMU预测提供的两...](http://n3.image.pg0.cn/T1gEq5BmWy1RCvBVdK.jpg)
图2. 基于块的方法[16]的测量模型与本文方法进行比较的简图:[16]中基于块的方法;(b)我们的方法。在[16]中,根据IMU预测提供的两...

5.3 扩展卡尔曼滤波环路这种扩展卡尔曼滤波环路与线性卡尔曼滤波环路几乎相同,只是。- 尽可能使用精确的非线性状态更新和测量...
![图2. 基于块的方法[16]的测量模型与本文方法进行比较的简图:[16]中基于块的方法;(b)我们的方法。在[16]中,根据IMU预测提供的两...](http://n1.image.pg0.cn/T1is45BmKX1RCvBVdK.jpg)
图2. 基于块的方法[16]的测量模型与本文方法进行比较的简图:[16]中基于块的方法;(b)我们的方法。在[16]中,根据IMU预测提供的两...

改进后的扩展卡尔曼滤波融合算法95%的航向误差小于6.38Ⱟ0%航向误差小于2.46Ⱟ—�ˆ差为1.66 m。 3.2打电话状态实验 行人先...

图5. D-IEKF、VINS-Mono和ROVIO的速度误差箱线图比较。左边的子图为5次低速飞行的结果,右边的子图为2次高速飞行的结果。飞...

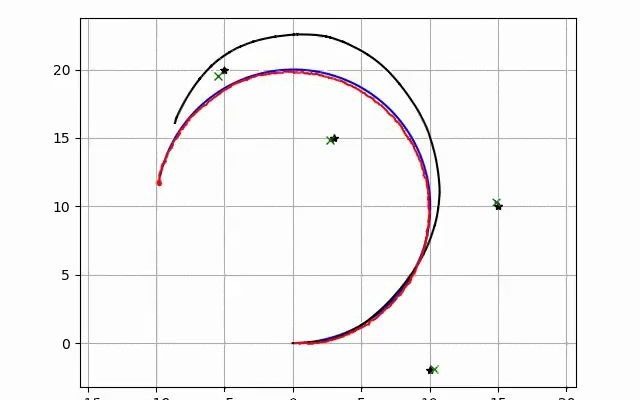
扩展的卡尔曼滤能够估计状态,特别是摩擦状态。比较真实的模型状态和估计状态。估计的状态显示了对应于3个标准差的置信区间。...

改进后的扩展卡尔曼滤波融合算法95%的航向误差小于6.38Ⱟ0%航向误差小于2.46Ⱟ—�ˆ差为1.66 m。 3.2打电话状态实验 行人先...

请注意,滤波器的估计值跟踪了真实值,而且置信区间仍然有界。检查估计误差可以更深入地了解滤波器。 plot(t,True(1,:)-Est(1,:)


直接通过扩展卡尔曼滤波融合加速度计、陀螺仪和磁力计数据仍不能避免磁力环境干扰引起的误差,而改进扩展卡尔曼滤波后能够有效...

通常,扩展卡尔曼滤波器(EKF)被用于最优导航解决方案。EKF是卡尔曼滤波器的非线性版本,它使当前均值和协方差的线性估计。使用...

请注意,滤波器的估计值跟踪了真实值,而且置信区间仍然有界。检查估计误差可以更深入地了解滤波器。 plot(t,True(1,:)-Est(1,:)<br/...

扩展卡尔曼滤波融合算法同样受到磁力计的影响,而改进后的扩展卡尔曼滤波融合算法能够有效避免磁力计的影响,并在一定程度上消除...

加速度误差图显示,在引入故障的10秒左右,平均误差有微小的差异。查看误差统计,看看是否可以从计算的误差中检测出故障。加...

这篇文章指出,广泛使用的扩展卡尔曼滤波器(EKF)提供了一个直接的方法:它以因果和递归的方式,在过去所有的测量中估计状态...


在这篇文章中,作者提出了一种全新的拥有扩展卡尔曼滤波(EKF)的紧耦合公式的VLC/IMU集成系统,实现鲁棒的VLC惯性定位。通过...

加速度误差图显示,在引入故障的10秒左右,平均误差有微小的差异。查看误差统计,看看是否可以从计算的误差中检测出故障。加...

实验表明,采用扩展卡尔曼滤波(EKF)与模型预测控制(MPC)相结合的方法,实现了微型机器人的精准轨迹跟踪控制,在此策略下微型...
![图 5 扩展卡尔曼滤波器算法 [108] 2.5.2 因子图 SLAM [122] 正如该算法的名称所表示的那样,一个图用于重建环境地图以及机器人在...](http://n4.image.pg0.cn/T1ivMOBvZ_1RCvBVdK.jpg)
图 5 扩展卡尔曼滤波器算法 [108] 2.5.2 因子图 SLAM [122] 正如该算法的名称所表示的那样,一个图用于重建环境地图以及机器人在...

无人机的主动稳定是基于视觉跟踪,利用开源的鲁棒视觉惯性里程表(ROVIO),这是一个扩展的卡尔曼滤波器,可同时跟踪3D标志和...

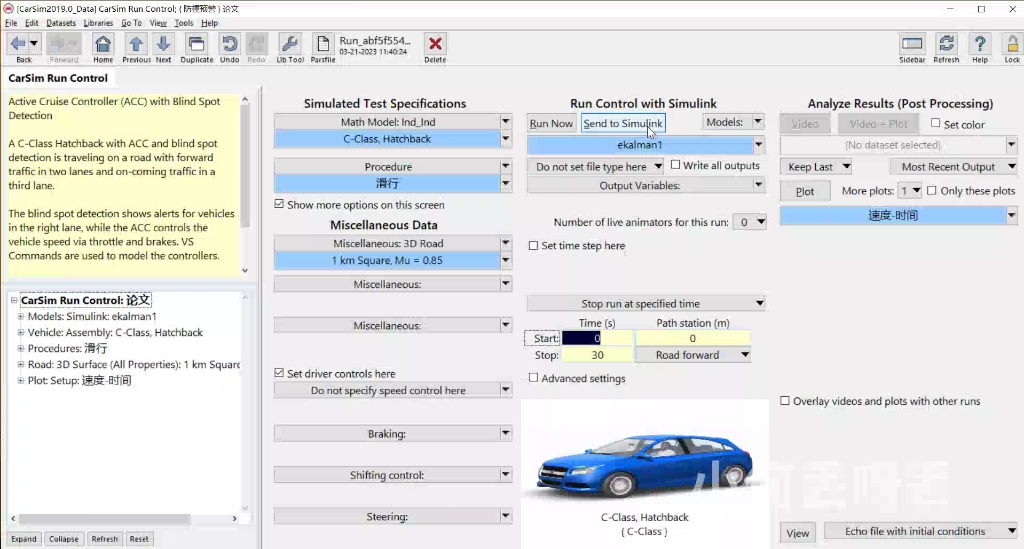
通过连续的运动信息,扩展型卡尔曼滤波器可得到每个汽车的位姿(pose)、速度以及转向角的预估值。研究人员实现了一种用于轨迹跟踪...

最优状态估计(卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、粒子滤波)等理论方法,培养学生综合应用线性代数、随机过程等知识...

新一代IMU标准的M-G365,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器*6的高速DSP*7能以较低...

第一个问题是在表示方面,mip-NeRF 适用于有界坐标空间中,而非无界场景,研究者使用一种看起来很像是一种扩展版的卡尔曼滤波...

新一代IMU标准的M-G365,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器*6的高速DSP*7能以较低...

实车验证:在83km/h车速DLC工况下,通过实车数据的训练,HNN 算法可很好地适应实车环境,估计性能优于扩展卡尔曼滤波算法。

基于扩展卡尔曼滤波(EKF)算法、多传感器信息融合技术,具有灵敏的环境感知与卓越的复杂环境适应能力、稳定的地图构建与高鲁棒性...
![ts.plot(window(data[, 1:4] / data[, 5:8], end = 2007)<br/>这里我选择了之前使用的泊松模型的一个多变量扩展。](http://n1.image.pg0.cn/T1GvpeBQhv1RCvBVdK.jpg)
ts.plot(window(data[, 1:4] / data[, 5:8], end = 2007)<br/>这里我选择了之前使用的泊松模型的一个多变量扩展。

相比于基于优化的方法,基于扩展卡尔曼滤波器的方法在VIO中仍然很流行,因为它的内存需求、CPU使用率和处理时间都很低。本文从...

通过连续的运动信息,扩展型卡尔曼滤波器可得到每个汽车的位姿(pose)、速度以及转向角的预估值。研究人员实现了一种用于轨迹跟踪...

卡尔曼滤波主要从神经网络/网络演化而来,在近十年还演化出扩展卡尔曼滤波;车云主题当前关注度较高,它的研究脉络可以在算法...

其他机构或自媒体如需转载,后台留言申请授权 摘要 广泛使用的扩展卡尔曼滤波器(EKF)提供了一个简单的方法,以因果和递归的方式...

为了将这种扭曲应用于 mip-NeRF 中的高斯函数,研究者使用了一个扩展版的卡尔曼滤波器,这样一来,没有边界的场景就可以被约束...

旨在研究一种可扩展方法,在机器学习系统中充分考虑来自传感器和...(例如卡尔曼滤波器)相结合的关键。作为该项目的一部分,极光...

第二种方法是设计或利用特定的算法来估计连续步态相位,如自适应振荡器和扩展的卡尔曼滤波器。它们有各自的优缺点:自适应振荡器...

这篇文章提出了一种基于乘法器交替方向法的可扩展分布式目标...每个传感车辆与其邻车进行通信,以执行类似卡尔曼滤波器的更新...
![典型的参数识别与更新方法包括: 卡尔曼滤波[17-19]、粒子滤波[...扩展模型, 主要用以描述裂纹扩展和层裂增长[24-25]. 例如, Li等[...](http://n1.image.pg0.cn/T1QJ9cB4Km1RCvBVdK.jpg)
典型的参数识别与更新方法包括: 卡尔曼滤波[17-19]、粒子滤波[...扩展模型, 主要用以描述裂纹扩展和层裂增长[24-25]. 例如, Li等[...

本文提出了一种基于乘法器交替方向法的可扩展分布式目标跟踪...每个传感车辆与其邻车进行通信,以执行类似卡尔曼滤波器的更新...
最新素材列表
相关内容推荐
专栏内容推荐
- 474 x 335 · jpeg
- 扩展卡尔曼滤波器实例与推导 - 知乎
- 1240 x 754 · png
- 卡尔曼滤波通俗易懂的解释_卡尔曼滤波简单理解-CSDN博客
- 548 x 393 · jpeg
- 扩展卡尔曼滤波 - 知乎
- 1254 x 416 · jpeg
- 自动驾驶感知融合-卡尔曼及扩展卡尔曼滤波(Lidar&Radar) - 知乎
- 978 x 499 · png
- 卡尔曼滤波滤波方程_了解卡尔曼滤波器及其方程-CSDN博客
- 1147 x 625 · png
- 自动驾驶中扩展卡尔曼滤波器的应用(Extended Kalman Filter)_extendedkalmanfilter-CSDN博客
- 2432 x 1552 · png
- 目标跟踪-------卡尔曼滤波_目标跟踪中卡尔曼滤波的 mean-CSDN博客
- 989 x 615 · png
- 扩展卡尔曼滤波(EKF)算法详细推导及仿真(Matlab)_ekf算法-CSDN博客
- 1275 x 1270 · png
- 序贯最小二乘平差 VS 卡尔曼滤波
- 1268 x 579 · png
- 扩展卡尔曼滤波教程(四)----中文版-CSDN博客
- 1920 x 1017 · jpeg
- 从原理到实战 | 扩展卡尔曼滤波器(含代码) - 知乎
- 1219 x 865 · png
- 卡尔曼(Kalman)滤波及C++例程_c++卡尔曼滤波状态方程-CSDN博客
- 1897 x 996 · jpeg
- 锂电池SOC估计基于二阶RC模型的扩展卡尔曼滤波估算SOC-聚码科技
- 859 x 935 · png
- 概率机器人——高斯滤波(卡尔曼滤波) - 知乎
- 2027 x 1774 · png
- 基于扩展和无迹卡尔曼滤波(EKF, UKF)的电力系统动态状态估计_ukf和ekf故障预测技术-CSDN博客
- 1292 x 1045 · png
- (扩展)卡尔曼滤波算法原理_扩展卡尔曼滤波 非线性方程对噪声的偏导-CSDN博客
- 1297 x 590 · png
- 卡尔曼滤波原理(十二)扩展卡尔曼滤波:EKF、二阶EKF、迭代EKF - 知乎
- 865 x 651 · png
- (扩展)卡尔曼滤波算法原理_扩展卡尔曼滤波 非线性方程对噪声的偏导-CSDN博客
- 1200 x 488 · png
- 卡尔曼滤波原理(十二)扩展卡尔曼滤波:EKF、二阶EKF、迭代EKF - 知乎
- 1018 x 900 · jpeg
- 卡尔曼滤波家族 - 古月居
- 1124 x 995 · png
- 【状态估计】粒子滤波器、Σ点滤波器和扩展/线性卡尔曼滤波器研究(Matlab代码实现)_粒子滤波 matlab-CSDN博客
- 474 x 287 · jpeg
- 【滤波跟踪】基于扩展卡尔曼滤波器实现 IMU 和 GPS 数据计算无人机的姿态附matlab代码...-CSDN博客
- 474 x 308 · jpeg
- 一种基于扩展卡尔曼滤波的无人机角加速度估计方法及装置与流程
- 1080 x 1440 · jpeg
- EKF扩展卡尔曼滤波,cpp ,Imu与里程计融合定位,可视化,并比较单一里程计的定位结果_imu ekf-CSDN博客
- 945 x 778 · png
- 基于自适应扩展卡尔曼滤波的锂离子电池荷电状态估计
- 589 x 1000 · jpeg
- 基于扩展卡尔曼滤波的高速旋转弹气动参数辨识方法与流程
- 1204 x 335 · png
- 【状态估计】基于卡尔曼滤波器和扩展卡尔曼滤波器用于 INS/GNSS 导航、目标跟踪和地形参考导航研究(Matlab代码实现)_gnss ...
- 554 x 439 · jpeg
- (三十九)通俗易懂理解——卡尔曼滤波与扩展卡尔曼滤波
- 1920 x 1017 · jpeg
- 形象化理解卡尔曼滤波:最小例子及代码 - 知乎
- 1299 x 1788 · jpeg
- 基于最大相关熵扩展卡尔曼滤波的机动目标跟踪方法
- 1119 x 674 · jpeg
- 图解卡尔曼滤波器,无需深厚的数学知识也易懂(第四部分:一维卡尔曼滤波器【上】) - 知乎
- 900 x 1200 · jpeg
- 卡尔曼滤波与应用和MATLAB程序详解视频实时技术信号处理
- 1000 x 432 · gif
- 一种利用扩展卡尔曼滤波算法估算锂电池SOC的方法与流程
- 1249 x 732 · png
- 卡尔曼滤波原理公式详细推导过程[包括引出]_卡尔曼滤波公式推导-CSDN博客
- 1782 x 939 · png
- EKF(扩展卡尔曼滤波)也需要调参 ,也是Q和R这两个参数。_ekf调参-CSDN博客
随机内容推荐
自我驱动
新型研发机构
大阳古镇
熵编码
论语子路
音乐常识
xmind模板
蜘蛛侠的故事
小米激活
惠远古城
抹大拉的马利亚
xd软件
新手司机
最网e调查
面包店图片
太赫兹成像
悲剧人偶
月亮先生
部队车牌
论述类文本
qta
推文编辑器
华为隐私空间
韩国爽片
劳动法38条
蝶式期权
英语生词
如何去台湾
积分不等式
三国杀武将牌
曼德勃罗集
coombs
南京民宿推荐
富宝袋
极化码
瑜伽垫图片
ps怎么抠章
亚洲人种
领带结
微信怎么撤回
基向量
idea安装插件
泰式料理
大龙模型网
云裳小镇
cad环形阵列
丹镇北京
大腿照片
爱神维纳斯
hmrc
十三陵景区
python面试
比利时在哪里
mysql复制表
江户切子
家具美容修复
小而精
美国总统卡特
波多野结衣办公室
苹果手机锁屏密码
抽奖助手
hno2
静平衡
vue源码
爱心特殊符号
东北大学美国
第一次世界
俾路支
国产光刻机
粉红清真寺
小米阅读器
女士复仇
饭粒动态图
缅甸红宝石
猫的瞳孔
女假面骑士
洲际酒店会员
威尼斯在哪
直线拟合
浏览器缓存清理
姿态直播
钟无艳图片
武田信虎
下三角行列式
毛茛花
护资
南蒂罗尔
鱼的眼睛
毛茛花
香港古装剧
松下g85
杨思勖
零售药店
信息技术课
tcp是什么
误差修正模型
东莞几线城市
粤港两地车牌
贾玲照片
古代窗户
卡板箱
记工软件
生命轮回
外职业生涯
医院康复科
公安联考
日本为什么侵华
使命召唤好玩吗
深圳卓越
观察力训练
思维导图英语
中级工程师证
白月光朱砂痣
库恩塔克条件
青山渔村
风险矩阵法
旗袍的起源
白包
北京新区
小学科学小实验
铜鎏金
古代数字
用户黏性
法国地理位置
制度管人
算命的书
as引导定语从句
pr渲染快捷键
建筑功能
汉诺塔算法
身体部位图片
广州沙面岛
banner模板
伊夫克莱因
解析延拓
挪威猫
solid原则
VEX机器人大赛
口才艺术
国产光刻机
仓库设计
asic码
豪顿华
庙岛
葡萄牙殖民地
牛肉分割图
成都砂舞吧
五颜六色的花
后腿
拖运
夏天的风景
阿尔克墨涅
高等数学知识点
上巽下艮
sdq
重庆豆花
联合国会员国
熨斗大厦
陈宝权
测头
草泥马表情包
机型对比
计算机简历模板
养老理财
上海美国学校学费
汤兰兰案
心理证书
核动力破冰船
圣诞快乐劳伦斯
招聘管理制度
4tobi
庚金命
化工与制药类专业
极限驷马
爱心特殊符号
国内电商平台
区划代码查询
象棋飞刀
含参不等式
渗透测试报告
肌肉生长
怼逼网
公司logo图片
甘露寺之变
兼职推荐
论文版面费
李群李代数
中国十大最美海岛
性啪啪啪
二次型矩阵
贝弗里奇
满族语
人源化小鼠
深圳地铁21号线
硫化镁
集港
电脑文件搜索软件
基本保额
电影画面比例
京东会员有什么用
今日热点推荐
百雀羚化妆品涉嫌添加禁用原料基本属实
俄认定有核国家支持的侵略为联合攻击
电力高速公路上的中巴友谊
雅加达不再为印尼首都
专家称伤人老虎或来自俄罗斯
家长吐槽10元配餐简陋孩子吃不饱
甘肃教育厅正在核实小蜜蜂老师身份
白夜破晓开播
宋莹经典台词是蒋欣即兴发挥
特朗普现身星舰发射现场
王大发说丁禹兮火不久
浙江烧伤妈妈丈夫已开橱窗带货
何同学致歉
国足所在小组彻底乱了
日本主帅说国足不是有进步是潜力大
歌手鹿晗
27岁女子祛斑手术10天后离世
漾漾 丁飞俊
心梗发作如何自救和互救
Hanni受职场霸凌信访被驳回
花16万治前列腺炎后得知不吃药能好
男生看见雷军直接递上简历
百雀羚
下班后最轻松的副业
ABC卫生巾
华为官宣MateX6
石云鹏回应小巷人家大结局没鹏飞
庄筱婷智性恋天菜
子期强制妙妙版
白夜追凶
神舟一号首飞成功25周年
T1与Zeus未续约原因
吉林一高校倡导女生主动微笑点头
站姐拍的虞书欣丁禹兮
范丞丞直播
中国每一个早晨都有限时美景
海关截获超9000吨洋垃圾
国足跌至小组垫底
时隔37天星舰进行第六次试飞
孙颖莎王艺迪今晚出战女双
国足vs日本
阿根廷vs秘鲁
教体局回应公办初中10元配餐吃不饱
女子用过期眼药水视力降至0.1
Zeus离队
祝绪祝绪丹丹 祝绪祝绪丹
林峯TVB台庆压轴
老虎伤人当地要求提前准备麻醉枪
T1
T1连夜清空Zeus信息
【版权声明】内容转摘请注明来源:http://maijichuang.cn/s8eogd_20241120 本文标题:《maijichuang.cn/s8eogd_20241120》
本站禁止使用代理访问,建议使用真实IP访问当前页面。
当前用户设备IP:3.145.178.224
当前用户设备UA:Mozilla/5.0 AppleWebKit/537.36 (KHTML, like Gecko; compatible; ClaudeBot/1.0; +claudebot@anthropic.com)