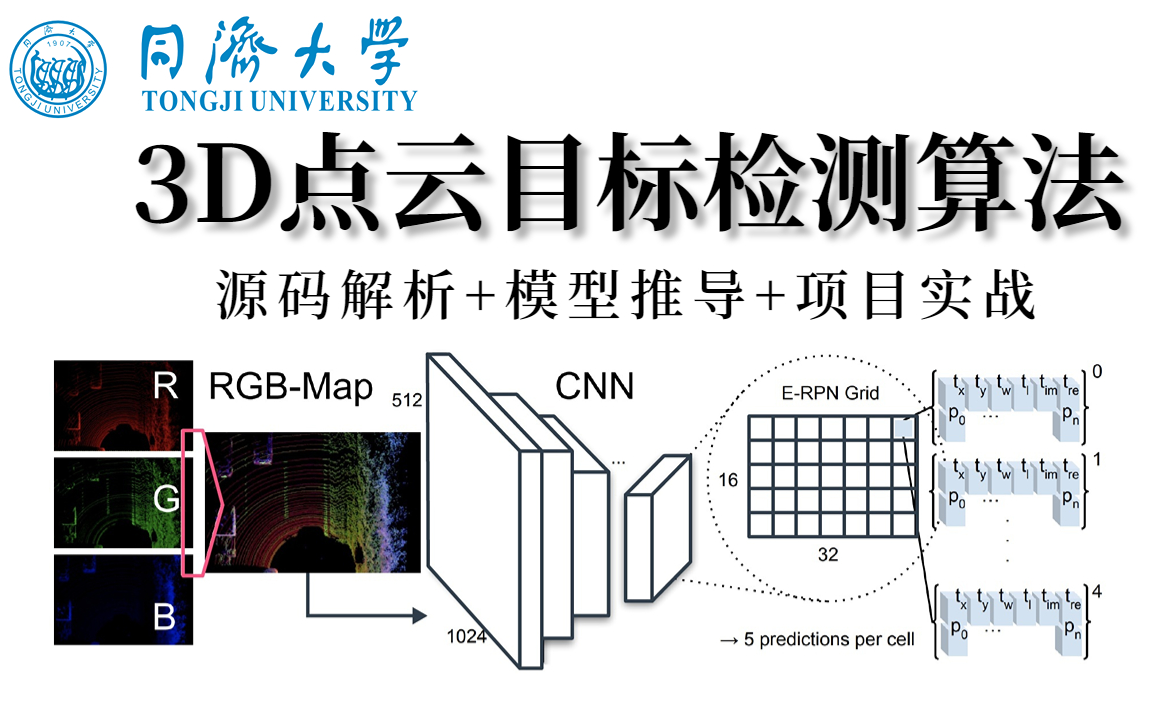
3d目标检测权威发布_3d目标检测国内外现状(2024年12月精准访谈)
浪潮SimpleBEV:多模态新突破 š 本周,我们深入研究了浪潮科技在arXiv上发布的图像+激光雷达多模态融合感知算法框架SimpleBEV。这篇文章在BEVFusion的基础上进行了改进,显著提升了感知性能。 一、论文核心亮点 在本文中,作者提出了一种名为SimpleBEV的感知算法模型。通过在nuScenes数据集上的实验,SimpleBEV实现了77.6%的NDS指标,在3D目标检测任务上达到了SOTA的感知性能。整体网络框架图如下: Š 二、研究背景 感知在自动驾驶系统中扮演着至关重要的角色。自动驾驶汽车配备了多种传感器,如激光雷达和图像传感器,以获得准确、全面的感知结果。激光雷达点云提供精确的定位和几何信息,而图像则提供丰富的语义信息。由于这两类传感器数据的互补特性,许多研究工作都在关注如何更好地融合视觉和激光雷达数据,以提高自动驾驶系统的3D目标检测性能。 砤𘉣€网络模型结构与技术细节 SimpleBEV算法由两条分支构成:Lidar Branch和Camera Branch。Lidar Branch采用了SECOND点云特征提取网络结构,通过多个稀疏3D卷积层生成多尺度3D特征。为了捕获多尺度目标的能力,作者引入了多尺度特征融合策略。首先,将不同阶段的多尺度3D特征转化为多个二维BEV特征。然后,利用多次上采样和卷积运算融合多个BEV特征,得到最终的LiDAR-BEV特征。 核心创新点二:Lidar Branch(针对激光雷达分支的相关改进) 激光雷达分支的整体架构如下图所示,采用了常见的SECOND点云特征提取网络结构。通过将多个稀疏3D卷积层依次应用到特征图上,生成多尺度3D特征。此外,为了捕获多尺度目标的能力,作者还引入了多尺度特征融合策略。 ᠥ››、融合策略 最后,将Camera分支和LiDAR分支得到的BEV特征进行通道维度的合并,并送入到BEVEncoder模块完成进一步的特征提取,最后接3D检测头输出最终的3D检测结果。 通过这些改进,SimpleBEV算法在多模态感知性能上取得了显著提升,为自动驾驶系统的感知任务提供了新的解决方案。
3D目标检测还有未来吗?” ### 自动驾驶的需求变化 — 在自动驾驶领域,4D建模变得越来越重要,而不仅仅是静态的3D建模。虽然很多公司都在宣传他们的Occupancy Network,但实际上展示的更多是3D建模,离特斯拉提出的Occupancy Flow概念还有很大差距。 下游任务的挑战 下游的路径规划需要预测未来几秒的轨迹,这意味着需要对未来的世界进行建模。Voxel级别的表示在时序目标检测和预测方面存在困难,尤其是预测未来轨迹时,需要处理目标与环境之间的交互。直接使用网络输出的流量来推断未来,可能导致目标在时序变化中出现不稳定性。 完整的上下游Pipeline ️ 虽然可以基于Occupancy建立一整套上下游的Pipeline,但要解决跟踪抖动和预测不稳定等问题,过程相当复杂。因此,Occupancy Network的作用在逐渐被替代。目前,特斯拉等公司正在开发的world model和端到端(end-to-end)解决方案,通过神经网络直接预测未来场景并输出规划和控制结果。 Occupancy Network的地位 … 在新的自动驾驶框架中,Occupancy Network可能只是一个中间表示,甚至不再需要这样的中间步骤。未来趋势更倾向于直接从环境建模到控制的整体网络,简化了传统复杂的流程,提升了效率和精度。 总的来说,虽然3D目标检测在过去和现在都有其应用价值,但随着技术的发展和需求的变化,它可能不再是未来自动驾驶技术的核心。
目标检测的创新点有哪些?” 目标检测在各种场景下都有广泛的应用,从医学影像到交通监控,再到安防X光检测,它的应用场景真是五花八门。那么,这些场景下的目标检测有哪些创新点呢?让我们一起来看看吧! 多场景应用下的目标检测创新点 通用目标检测:多尺度特征融合 在通用目标检测中,多尺度特征的选择和融合是一个重要的创新点。通过结合不同尺度的特征,可以有效提升模型的检测性能。 注意力和Transformer的探索 利用注意力和Transformer模型进行目标检测也是一个热门方向。通过引入注意力机制,模型可以更好地关注关键区域,从而提高检测准确率。 结合扩散模型 将扩散模型与目标检测相结合也是一个新颖的思路。扩散模型可以帮助模型更好地处理复杂场景下的目标检测问题。 结合大语言模型/图神经网络 将大语言模型或图神经网络与目标检测相结合,可以进一步提升模型的泛化能力和检测效果。 轻量级目标检测网络 𑊨‡级目标检测网络 针对网络结构复杂、参数过多的问题,设计轻量化模型是一个重要的创新点。通过优化网络结构,可以在保证检测效果的同时,降低模型的复杂度。 特定问题的目标检测 针对特定应用场景下的目标检测问题,通过增加适配性的网络模块来提升效果也是一个有效的途径。比如,针对特殊的应用问题,可以设计特定的网络结构来优化检测效果。 结合对比学习 将对比学习与目标检测相结合也是一个值得探索的方向。通过对比学习,模型可以更好地学习到目标的特征表示,从而提高检测准确率。 改进Transformer用于目标检测 针对损失函数进行改进,设计新的目标函数,可以加快网络的收敛速度,进一步提升目标检测的效果。 无监督/自监督/半监督学习 无监督、自监督和半监督学习的目标检测也是一个重要的创新点。通过研究新的训练方法,可以提升模型在不同领域的泛化能力。 遥感目标检测识别 关键区域快速提取 设计具有数据筛选机制的关键区域快速提取技术是一个重要的创新点。比如,基于自适应空间选择内核的候选区域提取技术可以有效提升提取速度和准确性。 旋转框检测 设计高精准、低复杂度的旋转框遥感检测器也是一个值得探索的方向。通过基于深度信息融合的多尺度感知模型,可以有效提升旋转框的检测效果。 网络压缩技术 研究网络剪枝、参数量化和知识蒸馏等多种模型压缩技术也是一个重要的创新点。通过面向在轨平台的近似无损网络压缩技术,可以有效降低模型的复杂度。 三维点云领域目标检测 三维点云/伪点云中的目标检测 通过间接获得点云的方式,实现图像的3D目标检测是一个新颖的思路。比如,可以利用伪点云的方法来进行三维目标检测。 二维-三维融合用于三维目标检测 研究2D3D融合方法,提升多模态目标检测性能也是一个重要的创新点。通过结合二维和三维的信息,可以有效提升三维目标检测的效果。 总的来说,目标检测的创新点非常丰富多样,涵盖了从网络结构到应用场景的各个方面。希望这些信息能给你带来一些灵感!က
轻舟智航面试全攻略:从技术到HR ### 一面:实习经历与模型优化 “ 在第一轮面试中,面试官主要询问了我的实习经历。几乎每段实习都得到了详细的探讨,特别是模型训练效果不佳时该如何调整,以及可能存在的问题和优化方向。我还被问到了关于目前各大主机厂使用的感知方案,虽然当时脑子有点抽,回答不太理想,但后来意识到面试官可能想了解的是主流的3D目标检测方法和融合方案。此外,还有两个代码题,难度适中,整体体验不错。面试官还详细介绍了部门的业务情况,让我对未来充满了信心。 二面:技术细节与挑战 犊第二轮面试主要探讨了ealss模型的细节,如何解决分辨率和模型容量不能同时满足的问题。还谈到了使用LSTM的时序网络进行车尾灯检测的细节,如何获取多帧的特征信息。面试官还问到能否将车尾灯标签预测作为YOLO额外的任务head预测,而不是再进行特征提取等操作。代码题很简单,要求找出一个先增再减序列的最大值,并询问了如何用二分法解决。面试官表情严肃,我也有些紧张。 HR面:职业规划与行业看法 ” HR面试主要是开放性问题,包括对自动驾驶行业的看法、端到端的了解和看法,以及自驾解决方案企业相较于主机厂做自驾的优缺点。还简单询问了薪资期望,感觉有些低估了市场行情。 反问与内部了解 在面试结束前,我询问了感知组是否只负责感知部分,还是需要带上部署后处理等上车调试。面试官也简单介绍了轻舟的发展历程和团队情况。整体氛围不错,公司在为理想汽车提供解决方案,上半年还去顺义出差了几个月。工作强度不大,但算法部门可能较高。去年年终奖有些不如意。 总结 这次面试经历让我对轻舟智航有了更深入的了解,也让我对自己的职业规划有了更清晰的定位。希望这次分享能对同样在寻找自动驾驶行业机会的你有所帮助!
2022年CVPR精选200篇论文推荐 最近周末我也没闲着,为了让大家能更快地获取和学习最新的计算机视觉技术,我特意整理了近200篇精选论文,涵盖了目前最热门的研究方向壀‚下面给大家简单介绍一下这些论文的主题‡ ƒ GCN、GNN ƒ GAN ƒ 迁移学习 ƒ 目标检测:(2D、3D) ƒ 目标跟踪 ƒ 模型训练 ƒ 异常检测、伪装目标检测、视频、人物交互、关键点、消失点、车道线、边缘检测 ƒ 监督学习 ƒ 分割:(语义分割、图像分割、全景分割) ƒ 多模态:视听学习、视觉﹣语言 ƒ 主动学习元学习 ƒ 图像转换、生成、合成、处理 ƒ 图像质量评估﹣人脸 ƒ 三维视觉(三维重建、3D点云) ƒ 人脸识别、人脸生成合成﹣重建﹣编辑﹣伪造 以上就是这些论文的大纲展示。
摸,因为这几天又玩了一下, 日常科普一下,玩置景的没事不要把盗版素材和有使用领域的导入编辑器分享或倒卖,Blender也一样,分享了留着以后随时可以被扒。 去年就连我也已经实现百万规模基于点云的3维模型的搜索,这玩意比图像还精准,因为图像还有各种角度视角,PS一下许多时候现在的模型还看不太出来,要看语义分割和目标检测的精准性。 不过好笑的是,许多收集各种变成合集的,有的说什么清朝已经付过钱了云云,反正乱得很,正经小朋友们不要被误导了。 编辑器置景一导出,一批量检测,3d模型除去贴图基本上,有乱搞的,或原创数据被偷盗的有需要帮助的可以找@剑域帝国
3D 激光点云的多目标跟踪 多目标跟踪中的检测后跟踪(Tracking-by-Detection)方法,其核心在于利用当前帧与先前帧的目标检测结果进行匹配。该方法架构由数据关联与滤波器两大模块构成。数据关联模块负责解决跨时间点的目标匹配难题,而滤波器模块则专注于目标的运动状态预估与轨迹更新。在数据关联方面,业界广泛采用的方法包括多重假设跟踪(MHT)、匈牙利算法(Hungarian Algorithm)、联合概率数据关联(JPDA)及全局最近邻(GNN)等。至于滤波器,卡尔曼滤波器与粒子滤波器则是最为常见的选择。ABJDMOT算法,作为这一领域的创新之作,巧妙地将匈牙利匹配与卡尔曼滤波器结合,以应对3D MOT挑战,其在性能上的显著提升赢得了工业界的广泛青睐。然而,ABJDMOT在4D(即加入时间维度的三维空间)匹配时,仅依赖于目标矩形框的3D重叠度,这在某些情境下可能导致前后帧间无重叠部分的目标被遗漏。为解决此问题,斯坦福大学与丰田技术研究院于2020年推出了PDMOT算法,该算法引入马氏距离作为匹配依据,结合匈牙利算法,旨在进一步提升算法性能。此外,学者们还不断探索在匹配过程中融入更多特征信息,如目标的几何尺寸、朝向、外形等,以增强匹配的准确性。例如,H.Wa等人的研究便是在此方向上的一次有益尝试。 针对多目标跟踪(MOT)领域,一些学者聚焦于改进基于轨进片段(tracklet-based)的方法,指出传统检测驱动的多目标跟踪算法过度依赖目标检测的性能,忽视了目标历史信息的有效利用。为此,他们探索了利用多帧点云序列或轨进片段,结合深度学习技术来提取目标的独特特征,旨在实现端到端的多目标跟踪解决方案。例如,在UCAI会议上,H.Wa等人提出的PC-TCNN算法便是这一思路的杰出代表。该算法创新性地从点云序列中初步生成候选轨进片段,随后对这些片段进行精细化处理,并通过将精细化的轨进与先前片段相关联,有效实现了对目标的连续追踪。相较于基于检测的3D MOT算法,此类基于轨进片段的方法往往能取得更高的跟踪精度,但在实时性方面仍有待进一步优化和提升。 在2020年的OS会议上,针对3D多目标跟踪问题,基于经典的2D图像目标跟踪算法SORT,创新性地提出了ABJDMOT算法。该算法聚焦于目标跟踪的精确性,通过采用向量匹配策略,有效对比当前帧与历史帧中目标的数据,并借助卡尔曼滤波在多维空间中精准估计目标的运动状态。ABJDMOT算法展现出卓越的性能,据统计,在多个基准测试中,其平均运行精度高达207 APPS,同时在多目标跟踪准确度(MOTA)方面亦表现优异。ABJDMOT算法的整体架构其核心流程包括五个关键步骤:首先,从目标检测模块获取当前帧(t时刻)目标的位置、大小及特征信息(A);随后,利用历史帧(t-1时刻)中各目标的运动信息,通过卡尔曼滤波预测其在当前帧的潜在状态(B);接着,通过数据关联模型,将当前帧的检测结果与卡尔曼滤波预测的目标状态进行匹配(C);对于成功匹配的目标,采用卡尔曼滤波的更新步骤,以获取其最新的运动状态估计(D)。这一过程确保了ABJDMOT算法在复杂场景下的高效与准确。 SimTrack,一种基于tracking-by-detection理念的3D多目标跟踪算法,当前在工业界占据核心地位。然而,其高度依赖即时的目标检测结果,且目标跟踪信息对检测优化的反馈不足。此外,匹配步骤复杂,需人工定制匹配规则并精细调整阈值与参数。SimTrack的运作流程,其核心在于利用多帧点云作为输入,通过基于柱状体素或普通体素的骨架网络提取特征,生成伪BEVs图像。随后,网络输出分化为三个关键分支:混合时间中心图分支用于定位目标在多帧点云序列中的首次出现位置,运动估计分支负责估算目标运动偏移,而回归分支则专注于获取目标的详细尺寸与姿态信息。在推理阶段,SimTrack凭借先前混合时间中心图中的位置信息与运动预测,预判当前各目标的可能位置,并与最新混合时间中心图进行关联,实现精准的目标跟踪与检测。SimTrack通过混合时间中心图创新性地整合了多帧点云中的目标信息,实现了目标的自动化匹配、消失目标的智能剔除与新生目标的即时检测,彻底摒弃了传统跟踪方法中的复杂启发式匹配步骤。这一创新不仅简化了跟踪流程,更为我们未来的研究与实践开辟了新的思路与方向。
机器视觉研究生项目:深度学习与视觉设计 我们提供机器视觉相关的研究生项目,涵盖业务设计和工程设计等领域。项目包括深度学习、传统算法和应用程序开发等多个方面。以下是一些具体的内容: 深度学习:涵盖YOLO系列目标检测、实例分割和目标跟踪等实现,以及模型改进套餐(如魔改YOLOv5/YOLOv8/YOLOv7/YOLOv9)。我们还提供模型代跑服务(4090)。 传统视觉:包括Halcon/OpenCV的应用,如手势识别、OCR识别和3D/2D测量等。 应用程序开发:涉及Qt、pyQt和C#等开发工具,包括算法嵌入、接口函数开发和深度学习模型部署等。 此外,我们还支持图片、视频和摄像头数据源,提供训练、模型改进和测试服务。如果有其他需求,欢迎具体协商。
ROS+Gazebo:机器人全解析 探索ROS和Gazebo仿真的世界,开启机器人设计与实现的奇妙旅程!€– 深入理解ROS(机器人操作系统)与Gazebo仿真的结合,为机器人设计与实现提供强大的技术支持。 — 从阿克曼小车到全向机器人,探索不同类型机器人的设计与实现。 砦ŽŒ握差速、双足、四轮、四轴飞行器的调试技巧,以及3D建图的方法。 䯸 路径规划、激光雷达避障、深度相机避障,提升机器人的自主导航能力。 ˆ 通过ROS2和ROS1项目,实现Gazebo仿真、RViz可视化、SLAM建图、自主避障路径规划导航以及多点导航。 探索机器人SLAM、路径规划、自主导航以及深度学习目标检测等任务。 ️ 调试、3D建图、路径规划、激光雷达避障,全方位提升机器人的性能。 加入我们,一起探索ROS与Gazebo仿真的无限可能!Ÿ
多模态融合3D目标检测教程(视频+答疑)
验光配镜
细心是什么意思
扫视的近义词
鸡枞怎么读
牡丹吊兰能吃吗
香港十大劲歌金曲
哈根达斯代言人
缘来非诚勿扰
减法分配律
芋头怎么保存
悄然而至的拼音
乘法口诀表图
小米手机关闭广告
北京大学副校长
聂风妈妈
拜拜用英语怎么说
西塘古镇一日游
九转还魂丹
痞帅怎么读
佛手的寓意和象征
动宾短语举例
纯棉是什么面料
猎巫
纸质版是什么意思
期货投资
空想主义
劲多音字组词
赵佶草书千字文
鸡大肠杆菌
乔欣演过的电视剧
阿菊
字母圈什么意思
日在校园剧情
拔萝卜什么意思
隋姓怎么读
牛绒
河北菜系代表菜
唐嫣罗晋身高对比
白鹿原豆瓣
桃核辟邪吗
养蜂法
坐便器安装图解
待定系数法
千古的意思
戌时是几点到几点
一什么鱼塘
祖国万岁歌词
鲁迅不干了
乙炔电子式
工厂化育苗
兵马俑在西安哪里
举措是什么意思
成贵高铁吧
古风小说推荐
高是什么结构
兔子多久喂一次水
可以组词什么
又又组词四个字
淡季是什么意思
郭资
什么是红色基因
四川民居
海上大教堂
别了是什么意思
落差歌词
邓艾技能
曾参怎么读
eye复数
豆芽怎么做
断崖式什么意思
好运来临剧情介绍
萝卜的英语怎么读
厨房美食
旎怎么读
贠姓怎么读
在太行山上歌词
邵氏鬼片
洛阳王府井
排球网高
凉拌折耳根图片
荼是什么意思
川一横是什么字
塞罕坝怎么读
魔兽骑士
儿童防晒
万事顺意
博基亚家族
kv444
关于数学的书
印章效果
依兰爱情故事歌词
人类中心主义
夏天的好处
汨和汩的区别
青岛哪个省的
担组词组
匹夫是什么意思
横多音字组词
大唐十二行房
典狱司歌词
新西游记演员表
wo怎么拼读
心损三项
铁血战士一共几部
宗怎么组词
张国荣和刘德华
溱湖簖蟹怎么读
马谡怎么读音
舌苔读音
动静等观
扬州大学是几本
了解的意思
冯绍峰的个人资料
应的部首
美团借钱查征信吗
质量数等于什么
动物生物化学
徐璐乔任梁
桃花指什么生肖
单人旁加
甘露寺之变
世界上最强的人
曾组词
做人有原则
曲笛和梆笛的区别
搞笑动漫推荐
人间城
昨日一去不复回
起来歌词
家族聚会简短讲话
帅气的小男孩
纳仁面
汽车打蜡步骤
传说中的七公主
三会一课是指
标声调口诀儿歌
嬴摎
年过花甲什么意思
杨紫体重
杜甫怎么读
优菈身高
坐化和圆寂的区别
雨字开头的成语
岂页合起来怎么读
棱锥的体积公式
邱五笔怎么打字
儿童拐卖
鸟用英语怎么说
渡我是什么意思
45cm有多长
妩媚的正确读音
汗青是什么意思
时柱代表什么
三酸两碱是指什么
阋于墙
安庆是哪里
狗猫鼠的主要内容
事业编是什么意思
苞米和玉米的区别
昆仑十二金仙
李连杰陈真
罩饼
仍组词
鹤唳华亭好看吗
戾读音
七月火把节歌词
铁怎么组词
宠物的英语怎么说
袜子用英语怎么读
池拼音
张嘉译沙溢
在线测量长度
豆腐炖什么好吃
废土文
链条规格
生物分类
小儿头孢
芈怎么读什么意思
电影特工
奇妙的数学王国
什么叫道德
自贡话
企鹅的知识
草字头加元
f和弦指法图
美酒聊共挥
一龙vs麦神猜
曹操败走华容道
永动机是什么
果腹还是裹腹
剪切胡克定律
手机对比评测
羽衣甘蓝是什么菜
土遁
风扇英文怎么读
小太监
坎肩儿的读音
韩国喜剧电影推荐
农村电影
贺峻霖神图
最新视频列表

基于yolov8,训练一个安全帽识别的目标检测模型 #深度学习 #计算机视觉 #目标检测 #yolov8 #每天跟我涨知识 抖音

3D目标检测(1)—mmDetection3D 概述哔哩哔哩bilibili

英伟达最新发布!超越其它所有SOTA的3D目标检测!哔哩哔哩bilibili

水下目标识别目标检测深度学习AI识别 您的AI已经训练好了,后期还可以继续训练优化 #人工智能 #ai #目标识别 #rov #水下无人机 抖音
【多模态3D目标检测算法+3D点云】目前站内最完整的3D点云目标检测算法教程,全100集包含入门到精通所有干货,存下吧!有这还啃书??哔哩哔哩...
![[Mono3D Survey] 交大计算机博士整理!一小时带你一文看透单目3D目标检测!哔哩哔哩bilibili](https://i2.hdslb.com/bfs/archive/5382b4f7167ceb394025760bf7b641511e90ba94.png)
[Mono3D Survey] 交大计算机博士整理!一小时带你一文看透单目3D目标检测!哔哩哔哩bilibili

基于单目视觉的3D目标检测模型RTM3D,平台colab哔哩哔哩bilibili
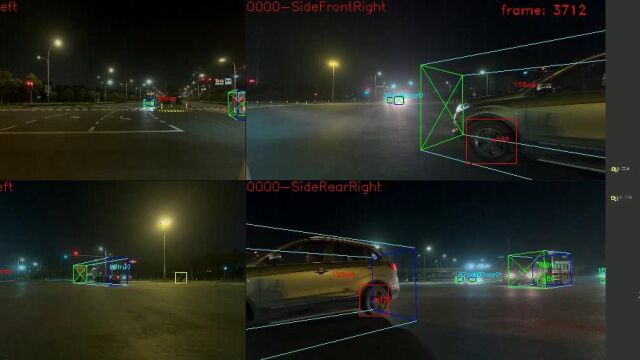
视频5:夜间场景的 3D 目标检测效果
基于能量模型的精确3D目标检测哔哩哔哩bilibili
最新素材列表
相关内容推荐
专栏内容推荐
- 1087 x 630 · png
- 3D目标检测(3):OpenPCDet训练篇--在KITTI数据集上跑起来 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1045 x 708 · png
- 汇总|基于激光雷达的3D目标检测开源项目&数据集 - 忆云竹
- 素材来自:eyunzhu.com
- 889 x 501 · png
- 3D 目标检测综述:从数据集到 2D 和 3D 方法-极市开发者社区
- 素材来自:cvmart.net
- 1080 x 1408 · jpeg
- 移动端实时3D目标检测,谷歌开源出品,安卓下载就能用
- 素材来自:picture.iczhiku.com
- 483 x 332 · png
- CVPR2020论文介绍: 3D 目标检测高效算法 - 吴建明wujianming - 博客园
- 素材来自:cnblogs.com
- 1080 x 467 · png
- 3D目标检测框架综述(OpenPCDet、mmdet3d、Det3D、Paddle3D)-CSDN博客
- 素材来自:blog.csdn.net
- 1078 x 325 · jpeg
- 中科院实时单目3D目标检测算法RTM3D将开源_技术前沿_下载_汽车测试网
- 素材来自:auto-testing.net
- 1640 x 732 · png
- 3D目标检测Lidar_only 数据集和项目汇总_mmdetection3d lidar only-CSDN博客
- 素材来自:blog.csdn.net
- 2066 x 612 · jpeg
- 视觉3D目标检测,从视觉几何到BEV检测 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1036 x 818 · png
- 3D目标检测进展综述 - 专知VIP
- 素材来自:zhuanzhi.ai
- 1080 x 751 · png
- ECCV 2020论文大盘点-3D目标检测篇_2004.02693-CSDN博客
- 素材来自:blog.csdn.net
- 2542 x 820 · png
- 从零实现一个3D目标检测算法(1):3D目标检测概述_3d目标检测算法框架-CSDN博客
- 素材来自:blog.csdn.net
- 1080 x 608 · png
- Det3D - 首个通用 3D 目标检测框架-CSDN博客
- 素材来自:blog.csdn.net
- 803 x 877 ·
- 一文教你读懂3D目标检测 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1080 x 700 · png
- 用目标检测思路做目标跟踪? MAML-Tracker: 小样本即可得高准确率|CVPR2020-极市开发者社区
- 素材来自:cvmart.net
- 2018 x 616 · jpeg
- 视觉3D目标检测,从视觉几何到BEV检测 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 720 x 234 · jpeg
- 3D目标检测方法总结 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1144 x 290 · jpeg
- 3D目标检测方法总结 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 600 x 808 · jpeg
- 【论文阅读】RoarNet 3D目标检测笔记 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1080 x 472 · png
- 目标检测应用,实际应用,行为_大山谷图库
- 素材来自:dashangu.com
- 823 x 493 · png
- 谷歌发布3D目标检测数据集及检测方案-上海嘉励自动化科技有限公司
- 素材来自:jialiauto.com
- 2708 x 1522 · png
- 从零实现一个3D目标检测算法(1):3D目标检测概述_3d目标检测算法框架-CSDN博客
- 素材来自:blog.csdn.net
- 730 x 638 · jpeg
- 3D目标检测方法总结 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 720 x 128 · jpeg
- 3d目标检测方向中的单目3d检测怎么样? - 知乎
- 素材来自:zhihu.com
- 1287 x 746 · jpeg
- 单目3D目标检测 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 700 x 397 · png
- 3D目标检测综述:从数据集到2D和3D方法 - 设计与开发 - AI汽车网
- 素材来自:auto.vogel.com.cn
- 1211 x 486 · jpeg
- 多模态3D目标检测发展路线方法汇总!(决策级/特征级/点/体素融合) - 知乎
- 素材来自:zhuanlan.zhihu.com
- 904 x 668 · jpeg
- 【3D目标检测】3D Object Detection for Autonomous Driving: A Survey-CSDN博客
- 素材来自:blog.csdn.net
- 1920 x 1080 · jpeg
- 基于3D点云的目标检测概述 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1647 x 252 · png
- 【论文解读】单目3D目标检测 MonoCon(AAAI2022)-CSDN博客
- 素材来自:blog.csdn.net
- 1354 x 1278 · png
- 3D目标检测 | 视觉3D目标检测,从视觉几何到BEV检测 - 极术社区 - 连接开发者与智能计算生态
- 素材来自:aijishu.com
- 300 x 250 · png
- 2020070912441468 – 求索
- 素材来自:geekcontrol.cn
- 1185 x 407 · png
- 3D目标检测综述_point-based method-CSDN博客
- 素材来自:blog.csdn.net
- 1230 x 366 · png
- 万字长文概述单目3D目标检测算法 - 知乎
- 素材来自:zhuanlan.zhihu.com
- 1370 x 758 · png
- 3D目标检测 | 视觉3D目标检测,从视觉几何到BEV检测 - 极术社区 - 连接开发者与智能计算生态
- 素材来自:aijishu.com
随机内容推荐
光致发光光谱
柚子的诗句
四年级必读书
成熟熟女
生茶和熟茶的泡法
三坐标品牌
研究型人才
查理狗
保暖神器
法考都考哪些科目
戴尔截图快捷键
java20
电脑工作壁纸
社消零
清仙是什么仙
椎弓根的解剖图
严重的草莓鼻图片
任连子
28画生
联系实际
马厩图片
五显华光大帝
液氧甲烷
正常颈椎的图片
乐安江
传播的仪式观
夜景的诗句
喜羊羊懒羊羊
暗黑女星
小黄片图片
钟士季
供水pe管厂家
二级价格歧视例子
伊朗国家博物馆
跑步的步
劝学篇张之洞
积雪草面膜怎么样
常见介词
杜巴利伯爵夫人
野馄饨是什么意思
弗利萨大王
袁记云吞
CIPS宠物展
赵雷壁纸
赏秋的精美句子
玩弄调教
胡萝卜画
常见的菊花种类
画桥怎么画
中岳什么山
明青达
约会都有什么项目
卧龙出山
能唱歌的软件
皮影人物图片
简单相关系数
高数两个重要极限
信息素骗局
p网站
盘什么手串好
日月潭的照片
正三棱锥三视图
美电影
在厦门旅游
马陆图片
通行证续签自助机
函数渐近线
植被图片
西郊有密林
apifox
周围的搬家公司
妇女节是哪一天
罗庸
牛立播
图画大全图片简单
微信云备份
蜂窝吊顶
旧唯物主义认识论
殡葬专业学校
十二部经
西文字体是什么
手指甲盖发白图片
涡扇21
拼多多开店赚钱吗
pdfguru
存档证明怎么开
坦克的结构
鼓楼简介
火山爆发的画法
情绪黑洞
大明锦衣
广告名词解释
傻子照片
红双喜南洋经典
ungc
尼克酰胺
车载音乐歌曲
精美油画
财产清单模板
同性恋交友网站
紫罗兰颜色的图片
税费包括哪些内容
薯片配料表
图片重命名
糖画的历史
我的医保卡
猫有领地意识吗
天坛回音壁介绍
珍珠等级
川大邮箱
土木工程一级学科
悬山式屋顶
广电网络收费标准
真正的土鸡蛋图片
胜利油田在哪
会议桌牌制作
模型有哪些
禁毒绘画素材
经济思想
古斯塔夫三世
环岛路口怎么走
生气的表情怎么画
blgv
五视图
张首晟简介
东方式握拍
向量空间的维数
爱心图片壁纸
柬埔寨的货币
甜甜蜜蜜的动物
1nm芯片
稻草人主人公
西游记第43回
许凯个人简介
x的等价无穷小
七杀旺
415份数法
振成楼简介
丁公量
化成分容
中国有资产阶级吗
部落名称
蟾酥的图片
中国第一任总统
重檐屋顶
光的色散图片
梨状隐窝位置图
公交车站图片
养肝草全株图片
7days游戏
激发波长
啊好啊
http304
磨砂布
商品二重性
日历图片卡通
禁毒图片绘画
打站桩
2月几号过年
随意抽样
织女星图片
甲申年是哪年
tps和qps
资势
阿育王石柱
顺产全过程真实
张道陵天师
圣母图片
this的用法
反俄狄浦斯
自渡的图片
中国军衔等级排名
科普特语
机场最多的城市
iso审核
韫枝
鱼骨图图片
数乘矩阵
目赤图片
分享文件
做宠物繁殖赚钱吗
电脑桌面图标大小
鼻甲图片
富锂锰基正极材料
病历书写示范图片
粒径分布图
通讯稿是什么
sheet表格
花明楼简介
西洋参哪家好
脚骨拐图片
白银法案
如何测手机网速
柏林gdp
鸟类变形记
茅台酒工艺
r744
7days游戏
春神句芒
语文名言名句
今日热点推荐
韩国总统发布紧急戒严令
马斯克千亿美元薪酬梦又被她击碎
2024读懂中国
韩媒发布韩国军人撤出国会画面
男子转账被限额怒问银行
韩前总统文在寅发声
周密向周芯竹道歉
金龟子女儿因孩子断奶崩溃大哭
联合国成少爷名媛打卡地
外媒关注中国发现世界最大金矿
韩国会会议通过解除戒严决议
女硕士患精神分裂症失踪15年被找回
韩国总统府周边进入全面管制状态
苏州一露营者在帐篷内身亡
韩国议长称通知总统要求解除戒严令
娜扎经纪人回应有明星相
香奈儿大秀 死亡打光
乔欣被曝结婚后首现身
中国驻韩国大使馆深夜发布提醒
朱志鑫的酒窝
南韩汪峰
男子与军嫂同居4年被判刑
韩空降部队打碎玻璃窗进入国会
大年三十将消失五年
李在明要求韩国国会外军警撤退
离岸人民币跌近300点
韩要求罢工的医生48小时内返岗
19岁机车女网红因车祸去世
凯特哭着谈泰坦尼克号后直面身材羞辱
难怪有故人之姿 原来是故人之子
韩国部分网站瘫痪
花洛莉亚因广告存性暗示被罚
进入韩国国会主楼的军人全部撤出
山东舞蹈统考明确考生不得化妆
在韩中国公民紧急求助电话
中国半导体行业协会发声明
TWICE
孙俪女儿甄嬛写真
白宫回应韩国总统发布紧急戒严令
中国银行回应男子转账遇限额
韩国国会可投票推翻总统戒严令
患精神分裂症失踪15年女硕士哥哥发声
韩元汇率迅速下跌
特鲁多吐槽美加征关税
继承者们
我是刑警
美方说一套做一套实施单边霸凌行径
还有一个月就是2025了
于正退网也这样
T1四连败
【版权声明】内容转摘请注明来源:http://maijichuang.cn/estwzk_20241202 本文标题:《3d目标检测权威发布_3d目标检测国内外现状(2024年12月精准访谈)》
本站禁止使用代理访问,建议使用真实IP访问当前页面。
当前用户设备IP:18.116.49.243
当前用户设备UA:Mozilla/5.0 AppleWebKit/537.36 (KHTML, like Gecko; compatible; ClaudeBot/1.0; +claudebot@anthropic.com)